Laboratory for Dynamics of Machines and Structures
Kinematika in dinamika šest-osnega industrijskega robota
Povzetek
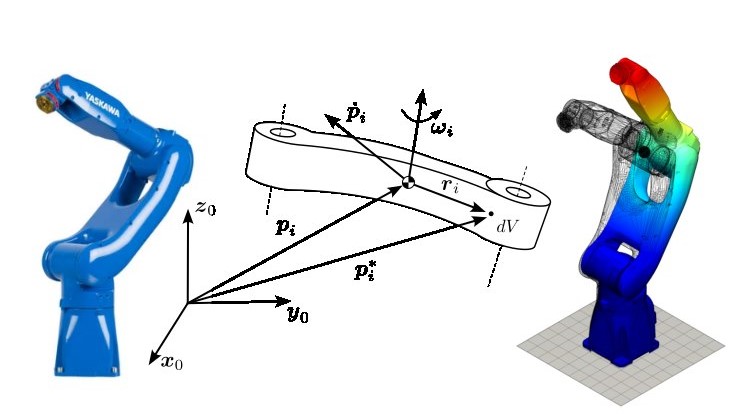
Industrijski roboti so v sodobni industriji nepogrešljivi, saj omogočajo avtomatizacijo proizvodnih procesov in povečujejo produktivnost. Za zagotavljanje pravilnega izvajanja nalog je potrebno poznavanje kinematike in dinamike robota. V delu je predstavljena izdelava modula za kinematsko in dinamsko analizo šest-osnega industrijskega robota. Implementiran je v programskem jeziku Python. Delo vsebuje pregled področja industrijskih robotov, teorijo osnovnih principov prostorskih transformacij, kinematike robotov in analitične dinamike. Na osnovi Denavit-Hartenbergove formulacije so izpeljane enačbe direktne in inverzne kinematike, ki so eksperimentalno preverjene na realnem robotskem sistemu. Z uporabo Lagrangeeve formulacije dinamike so izpeljane gibalne enačbe manipulatorja in izdelan dinamski model. Izvedena je tudi eksperimentalna modalna analiza robota Yaskawa GP7, na podlagi katere je dinamski model ustrezno posodobljen. Zaradi upoštevanja prečnih deformacij sklepov, je razširjen dinamski model, ki vsebuje dodatne prostostne stopnje, natančnejši pri modeliranju dinamičnega odziva robota. S posodobljenim modelom je izvedena simulacija dinamičnega odziva robota in napoved lastnih frekvenc pri določeni konfiguraciji robota.