Laboratory for Dynamics of Machines and Structures
Machine learning algorithm for rivet-squeezing force estimation based on the dynamic response of the joint
T. Vrtač,
M. Pogačar,
M. Kodrič and
G. Čepon
Mechanical Systems and Signal Processing, 2025
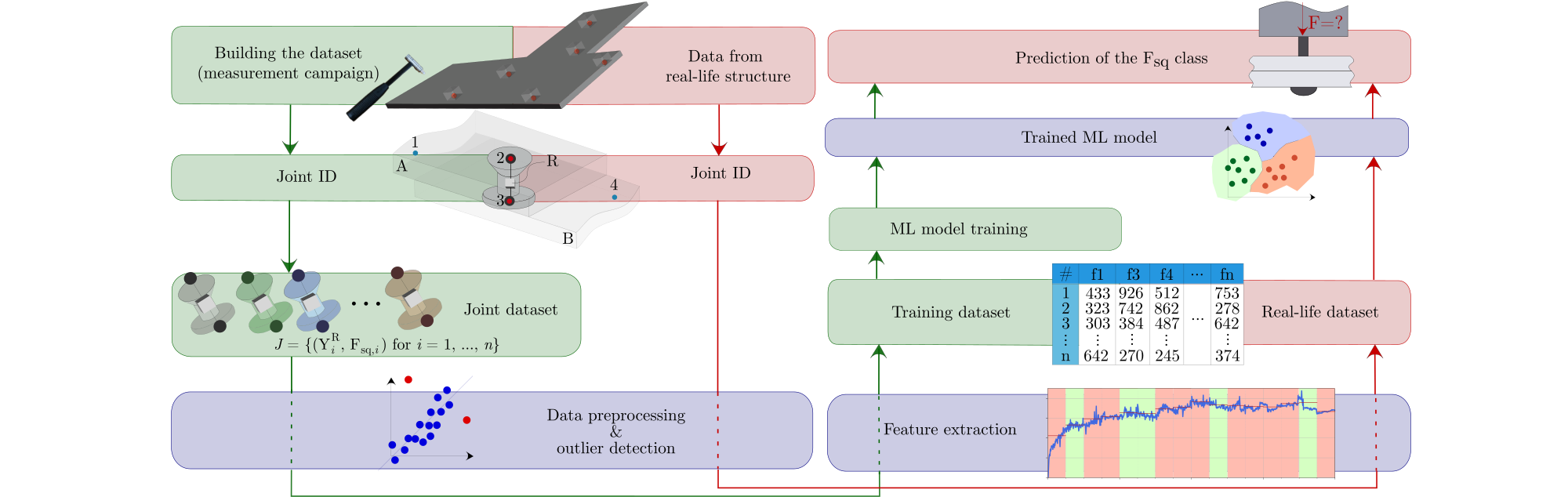
The rivet-squeezing force is one of the most influential parameters affecting the performance of a riveted joint. It directly affects the stress distribution near the joint, influencing mechanical properties, fatigue life, and failure mechanisms. Ensuring control over this parameter is therefore essential for product quality. Our prior research has shown that the squeezing force can be estimated post-production by analyzing the dynamic response of the joint — an approach that enables quality control even during later stages of a product’s lifecycle. Adequacy of the riveted joint’s mechanical performance is then estimated through comparison of the riveting force estimate to the desired reference value. Traditional methods rely on the similarity between the dynamic response of the observed joint and those of reference joints with known rivet-squeezing forces. This paper proposes an improved methodology that replaces the similarity-based criterion with a Machine Learning (ML) algorithm to enhance estimation robustness. As in the conventional method, dynamic substructuring is used to isolate the joint’s response from the surrounding assembly, enabling the application of the same ML model across different assemblies—provided that the material, geometric, and frictional properties near the joint remain consistent. The proposed method is validated through a laboratory case study and benchmarked against the existing LAC-based estimation approach. The case study results demonstrate improved robustness and broader generalization against the LAC-based approach. This indicates that the advanced inference capabilities allow the ML model to better distinguish the effects of the rivet-squeezing force from variations caused by material inconsistencies, minor changes in process parameters, or sensor placement compared to the LAC-based approach. The key challenge for the ML-based approach is to acquire a sufficiently large and representative dataset for the ML model training.
 download pdf
https://doi.org/10.1016/j.ymssp.2025.113478
download pdf
https://doi.org/10.1016/j.ymssp.2025.113478