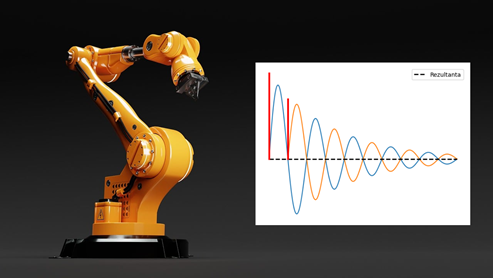
Pri uporabi robotskih manipulatorjev se zaradi optimiziranih masnih lastnosti pogosto srečujemo z zmanjšano togostjo naprave, ki pri hitrih gibih privede do nezaželenih nihanj, ki zmanjšajo natančnost. V okviru te naloge je potrebno narediti pregled obstoječih metod za umiritev nihanj robotskih manipulatorjev s posebnim poudarkom na metodi »input shaping«. Predvidena je numerična implementacija omenjene metode na poljubnem dinamskem sistemu (1-2 DoF).
Primer:
https://www.youtube.com/watch?v=yuxm859f2Uo
Kontakt:
Gregor Čepon