The manufacturing of bimorph, electrothermal actuators conventionally requires multiple processing steps, which limits design flexibility and customization. Thermoplastic extrusion 3D-printing offers a single-process method for manufacturing complex, multi-material geometries without additional assembly, thereby enhancing the design versatility. While single-process, 3D-printed sensors (e.g., piezoresistive or piezoelectric) have been extensively studied, the development of single-process, 3D-printed actuators remains limited. Key challenges in 3D-printed, thermoplastic actuators include orthotropic, time- and temperature-dependent material behavior, stress relaxation, and single-process design.
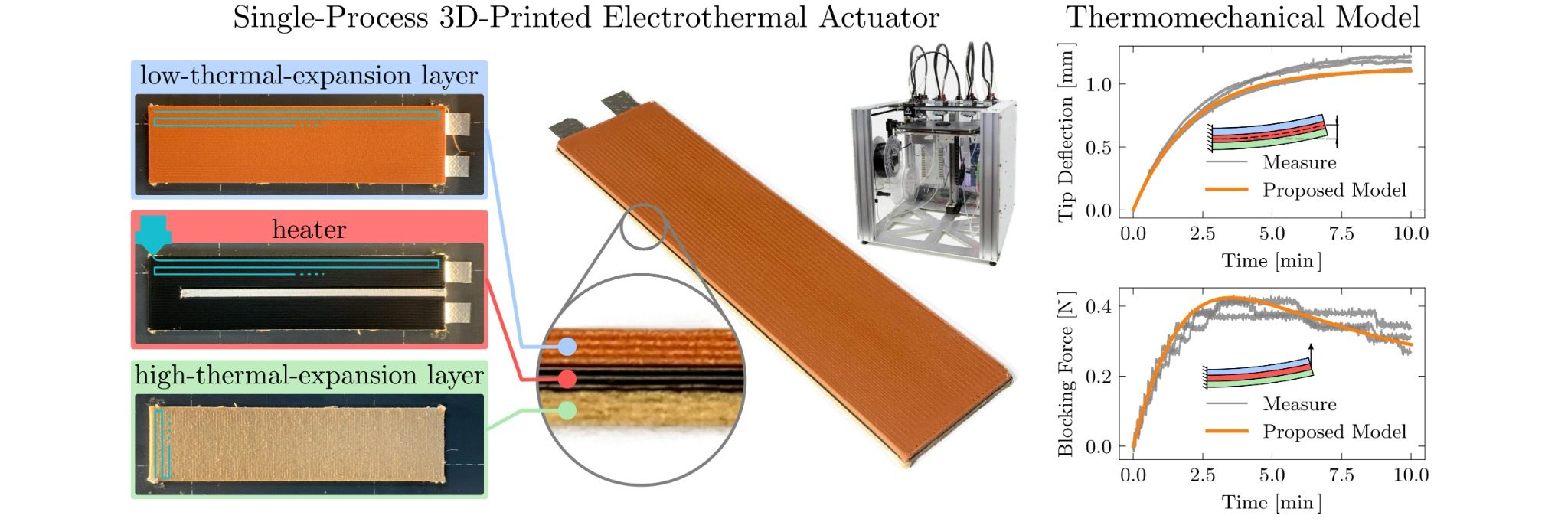
This study introduces a novel single-process 3D-printing method, and an analytical model for predicting the time-dependent tip deflection and blocking force of multilayer electrothermal actuators. The actuator is fully 3D-printed and consists of three material layers: a high-coefficient-of-thermal-expansion (CTE) layer, a heater layer, and a low-CTE layer. The proposed analytical model is distinctive in that it incorporates orthotropic, temperature-dependent material properties and accounts for stress-relaxation effects--factors typically neglected in conventional models. It predicts time-dependent tip deflection and blocking force as function of the applied voltage and is experimentally validated using actuators with two distinct material configurations.
The experimental results show close agreement with the model predictions, confirming the accuracy and reliability of the proposed approach. Moreover, the integration of a single-process manufacturing method with the novel, comprehensive analytical framework provides a robust foundation for advancing the development of 3D-printed, electrothermal actuators with improved actuation speed. These findings underscore the potential of scalable, high-performance, electrothermal actuators, manufactured in a single process, for actively controlled shape-morphing structures. This work paves the way for the future integration of actuation functionality into single-process, 3D-printed, smart and responsive devices.
 download pdf
https://doi.org/10.1016/j.ijmecsci.2025.110299
download pdf
https://doi.org/10.1016/j.ijmecsci.2025.110299
